哈薩克斯坦納扎爾巴耶夫大學研究團隊推出可變直徑車輪移動機器人
毅力號火星車等輪式移動機器人(WMRs),以車輪為唯一移動方式,專為平坦和崎嶇地表移動設計,因其高度通用性和環境適應性,在農業、國防、工業、物流、緊急搜救乃至行星探測等多個領域均得到了廣泛應用。
然而,面對樓梯、臺階和陡坡,WMRs常因結構限制難以應對。對此,大多數研究人員嘗試通過改裝提升其多功能性和穩定性。一般來說,WMRs的改裝主要有兩種方法:
一是加裝混合機制,如輪式、履帶式和腿式,形成地形自適應移動機器人(TAMRs)。TAMRs在輔助機構幫助下,具備高機動性,能根據地形調整形態,保持高效移動。但TAMRs設計和控制復雜,存在需大量執行器,且靜態穩定性不足等問題。

另一種方法是使用可變形結構。車輪尺寸的最優選擇對于應對多變地表、復雜環境導航、確保穩定性及優化能耗具有重要影響。可變直徑WMR通過嵌入異形主動/被動機構,能夠調整車輪直徑適應不同地形,并優化速度、提升能源利用效率和機動性。但目前,大多數可變直徑WMR系統只能進行越障等單一應用,在執行器多的同時,還犧牲了多功能性,增加了復雜性和輪廓。
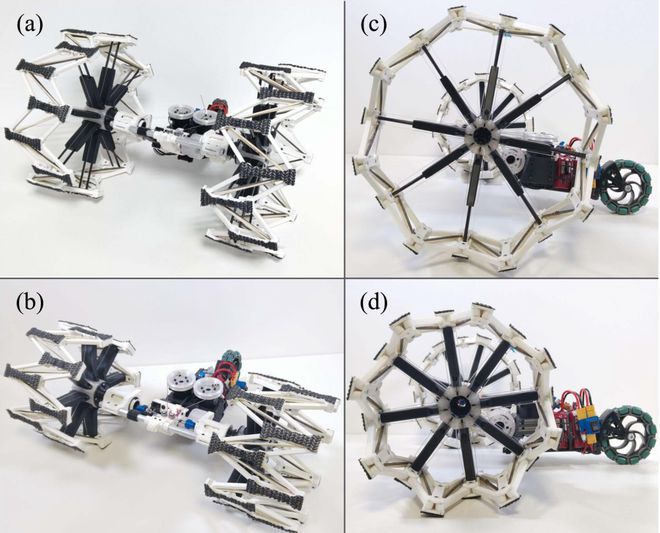
針對這一問題,來自哈薩克斯坦納扎爾巴耶夫大學的研究人員進行了深入研究,并提出了一種名為“Improbability Roller”的移動機器人。
該機器人配備了兩個可變直徑的車輪,能夠動態調整車輪直徑,且使用僅三個執行器便可實現前進/后退、轉向及獨立調節車輪直徑,從而在不同地形和任務間無縫切換。
同時,機器人采用了電纜驅動的驅動機構,可在0.74秒內閉合車輪,是該領域最快的驅動機構,這增強了其對不可預見環境和操作要求變化的響應能力。為驗證性能,研究團隊開發了一個運動學模型來分析機器人的運動學特性,以確保能準確預測不同輪徑下的行為。
此外,研究團隊還制定了一個開環控制策略。該策略允許機器人根據預設參數進行移動、轉向和調整輪徑等基本操作。在實行開環策略的情況下,研究團隊通過跟蹤不同速度下的軌跡,團隊驗證了該方法的有效性。
值得一提的是,為了驗證機器人性能,研究團隊還進行了一系列實驗驗證,包括軌跡跟蹤測試、直徑調整速度測試、轉向角效應測試、爬坡能力測試和能效測試,以評估導航精度、輪徑變化響應時間、轉向角度影響、坡度性能和能源消耗。
“Improbability Roller”機器人的設計與制作融合了機械設計、運動學建模、開環控制和嵌入式系統架構等多個技術辦款。
在機械設計方面,“Improbability Roller”機器人的機械設計引入了可變直徑車輪機制,突破了傳統固定直徑機器人的局限。該機制通過伸縮桿、可擴展輪轂和柔性結構的組合,實現了車輪直徑的動態調整,不僅增強了機器人與地面的接觸面積,提升了牽引力和穩定性,還實現了機器人的超強地形適應能力。此外,機器人底盤作為整個結構的支撐基礎,采用了輕量且堅固的設計,以確保在承受操作負載的同時保持高效移動。
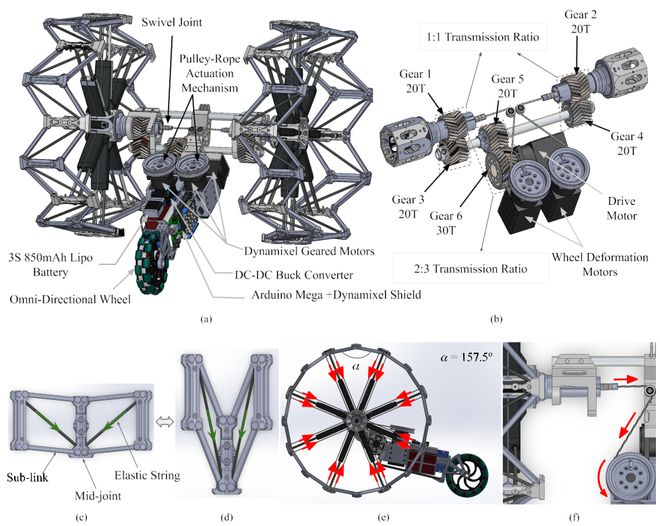
機器人車輪的設計靈感源自NASA的可折疊太陽能陣列項目,采用了類似的可擴展框架。具體來說,車輪由多個通過三個關節連接的子鏈接段組成,每個子鏈接段都支持車輪的平滑地擴展和收縮。車輪直徑的動態變化則依賴于固定在每個子鏈接段中部關節上的線性桿,這些線性桿通過線性軸承滑動。當對連接在關節上的字符串施加拉力時,會產生向車輪結構中心拉動的力,從而實現車輪直徑的調整。為了快速且高效地實現這一調整過程,研究團隊特別設計了一個由齒輪電機驅動的滑輪系統。
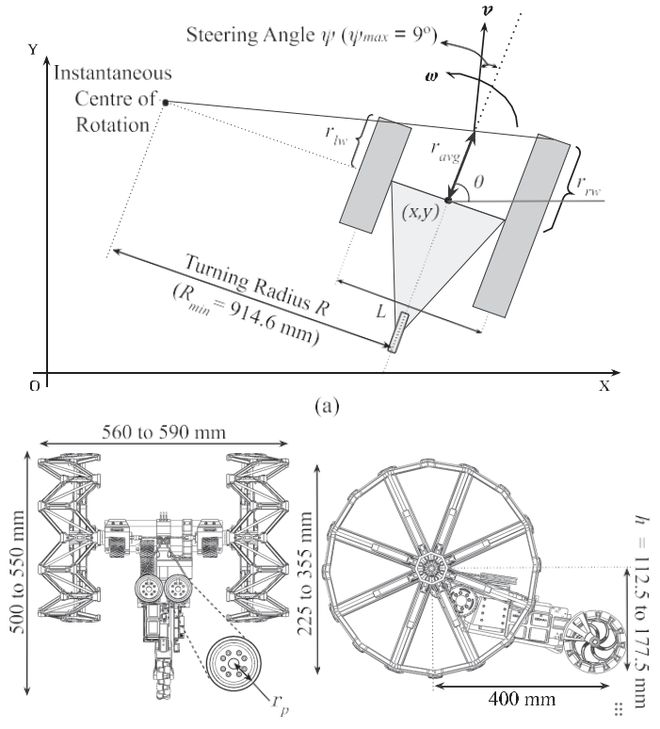
在運動學建模方面,為了描述機器人在實際環境中的運動狀態,研究團隊為“Improbability Roller”機器人構建了精確的運動學模型。該模型全面考慮了機器人的位置、高度、方向角等關鍵參數,并深入剖析了車輪半徑與車輪變形電機角速度之間的關系,考慮了驅動電機的齒輪比,以及機器人線性速度和角速度的計算方法。通過這一模型,研究團隊能夠準確預測機器人在不同控制輸入下的運動軌跡,這為后續控制策略的制定提供了有力支持。
在開環控制方面,研究團隊基于運動學模型,為“Improbability Roller”機器人量身定制了開環控制策略。該策略通過預定的軌跡配置文件來指導機器人的運動,實現了軌跡跟蹤和遠程操作模式的雙重功能。操作員可以實時提供線性速度和轉向角的參考值,系統則通過運動學模型將這些參考值轉換為執行器命令,從而實現對機器人的精準控制。

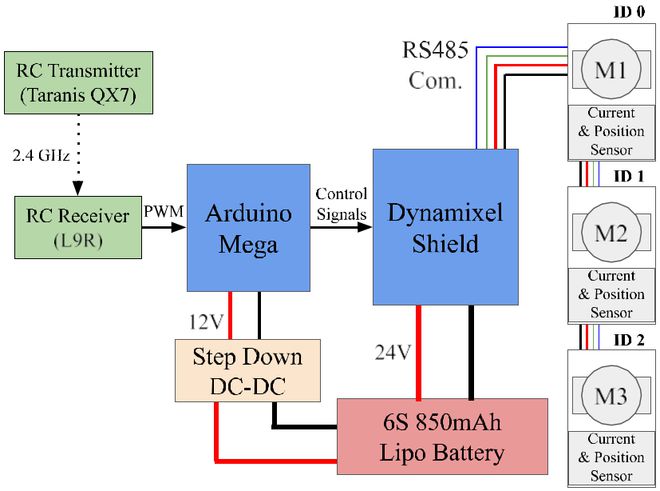
在嵌入式系統架構方面,“Improbability Roller”機器人采用了Arduino Mega2560微控制器作為主處理單元,并配備了先進的電機驅動器、無線通信模塊和電源系統。這一架構不僅確保了機器人能夠高效接收并執行高級命令,還實現了與Dynamixel齒輪電機的無縫連接和多點網絡通信。同時,2.4GHz無線攝像頭運動捕捉系統的加入,進一步提升了機器人的遠程操作精度和軌跡跟蹤能力。整個系統由高性能的LiPo電池供電,并通過降壓轉換器確保電壓穩定,為機器人的持續運行提供了可靠保障。
為了評估“Improbability Roller”機器人的開環軌跡跟蹤、車輪的打開和關閉速度、不同轉向角下的性能、不同車輪尺寸的爬坡能力以及各種條件下的成本運輸指標,研究團隊進行了一系列實驗來進行基準測試。
該實驗旨在驗證“Improbability Roller”機器人車輪尺寸變化的快速性和穩定性。相較其他驅動機構,利用電纜滑輪機制的“Improbability Roller”機器人,能夠在極短的時間內(0.74秒)將車輪尺寸從最大直徑調整至最小直徑。這種快速的致動能力對于機器人在實時適應環境和障礙方面至關重要。實驗還顯示,在車輪從擴展狀態變形至壓縮狀態時,電機電流消耗達到峰值(約1A),而在返回至默認(擴展)狀態時,由于利用了彈性字符串中儲存的勢能,電機電流消耗降低至約0.6A。
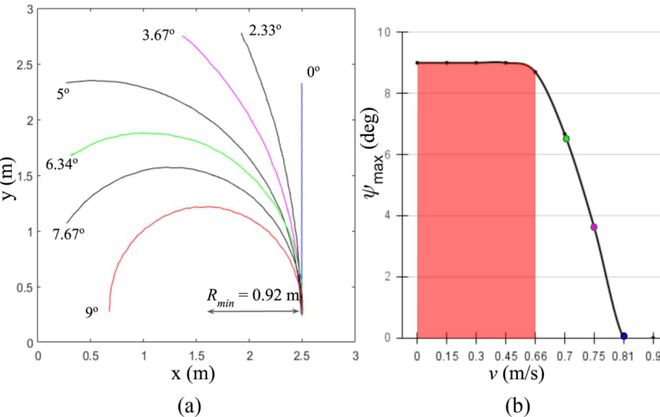
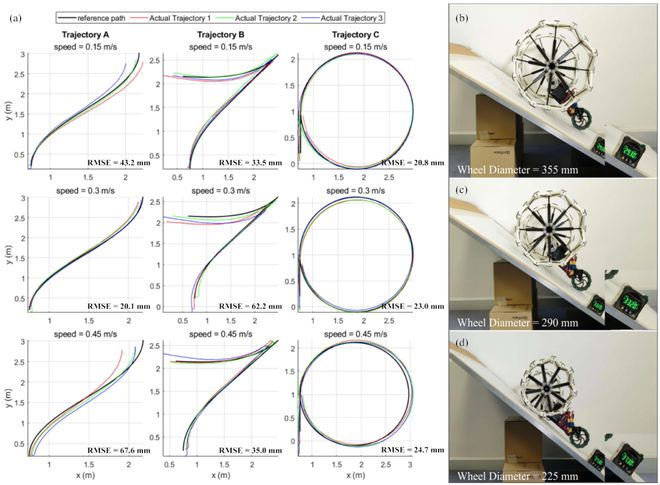
該實驗旨在評估機器人的軌跡跟蹤精度和轉向性能。“Improbability Roller”機器人配備了獨特的轉向機制,可通過獨立調整兩個車輪的直徑來實現不同的轉向角。研究團隊在不同速度和復雜軌跡下對機器人的轉向性能進行了全面評估。實驗結果顯示,機器人在S形軌跡、復雜路徑和直線加圓形軌跡等多種軌跡上均表現出了出色的軌跡跟蹤精度。同時,通過比較實際軌跡與模擬軌跡的均方根誤差(RMSE),研究團隊進一步驗證了機器人在真實世界應用中的潛力。
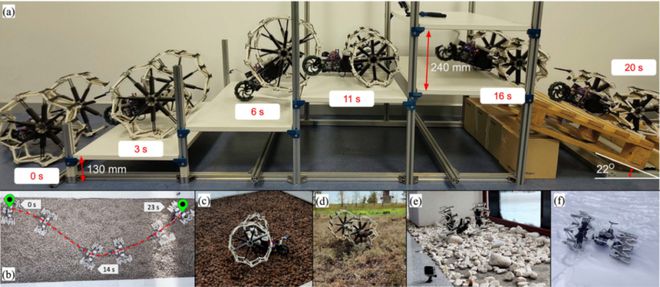
該實驗旨在驗證機器人在不同坡度上的穩定性和越障能力。可變直徑車輪使“Improbability Roller”機器人在爬坡能力方面表現卓越。通過調整車輪直徑,機器人能夠控制其質心位置,從而增強在斜坡上的穩定性和平衡性。實驗結果顯示,隨著車輪直徑的減小,機器人的爬坡能力顯著增強。在車輪直徑為225mm時,機器人甚至能夠成功攀爬高達37°的斜坡而不發生滑移。
在現實場景實驗中,研究團隊模擬了多種復雜地形和任務場景以全面評估“Improbability Roller”的實際應用潛力。機器人成功攀爬了高度為130mm的樓梯、穿越了寬度僅為240mm的狹窄空間,并在20秒內連續完成了這三項任務。此外,機器人還在松散的碎石、草地、巖石和雪地等多種地形上展現了其出色的地形適應能力和穩定的轉向性能。在最大負載實驗中,機器人更是承載了超過自身重量的額外4公斤負載,且車輪仍未發生變形。
該實驗旨在評估機器人在不同車輪尺寸和速度下的能耗表現。研究團隊采用成本運輸(CoT)指標評估了“Improbability Roller”機器人在不同車輪尺寸和速度下的能耗效率。實驗結果顯示,在平坦地面上行駛50m的距離時,機器人的CoT值隨著速度的增加而降低,表明機器人在高速行駛時更加節能。然而,車輪變形電機在維持中間和較小車輪直徑時需要消耗更多的能量,因此機器人的整體能耗效率受到了一定影響。這一發現為后續優化機器人的能耗管理提供了重要參考。
特別聲明:以上內容(如有圖片或視頻亦包括在內)為自媒體平臺“網易號”用戶上傳并發布,本平臺僅提供信息存儲服務。
立德機器人平臺,是一個集媒體品牌、智庫咨詢、投資孵化、引智招商為一體的機器人垂直領域服務平臺
臺積電對部分企業斷供7nm代工?知情人士:目前只要求企業配合核查投片資質
《編碼物候》展覽開幕 北京時代美術館以科學藝術解讀數字與生物交織的宇宙節律
Counterpoint 預估 2024 年手機均價 365 美元,高端化加速