
車企拋棄激光雷達(dá)智駕改用純視覺方案告訴你根本原因!
現(xiàn)在說到智能駕駛,必提激光雷達(dá)。但是,前段時(shí)間何小鵬去了趟美國,回來之后,就把激光雷達(dá)革命,就把自己的激光雷達(dá)給革了。
因?yàn)橹捌鋵?shí)小鵬的車,也一直在用激光雷達(dá),那么為什么看了特斯拉的FSD純視覺方案之后,很多廠家都想用純視覺方案呢?喵哥給大家聊聊我的一些觀點(diǎn)。
首先,激光雷達(dá)并不是不好,而是受限于成本。目前能夠自行生產(chǎn)激光雷達(dá)的,國內(nèi)就沒幾家,基本上都是買的人家的,而且買的國外的,很容易被人家掐脖子。
像華為自己是能夠產(chǎn)激光雷達(dá)的,而且它的192線激光雷達(dá),之前在比亞迪也說過,它要把激光雷達(dá)干到1000塊錢以內(nèi)。所以一旦成本下來之后,激光雷達(dá)的硬件成本就會(huì)變得很低。但是目前的話,對(duì)于很多車企來說,激光雷達(dá)的硬件成本還是偏高的。

第二,有了激光雷達(dá)之后,確實(shí)比沒有激光雷達(dá)好,在極限條件下,我說極限條件,比如說雨天、霧天,它的可見度要好很多。
比如說純視覺方案,在外面完全沒有燈光的情況下,你去開車,你看不見的時(shí)候,其實(shí)攝像頭它也看不見,雖然說在某些情況下,攝像頭比我們?nèi)搜鄣淖R(shí)別能力,在弱光下是會(huì)更好一些的。
但是如果光線很弱的話,遇到雨天遇到霧天它也不行。但是激光雷達(dá)可以,因?yàn)樗哂杏觎F穿透能力,而且你開激光雷達(dá)的車子,就是在完全外面一點(diǎn)燈光的情況下,它也能夠看見。但是這種場景有多少呢?這種場景可能遇到的情況并不是很多。
而且一旦加了激光雷達(dá)之后,你有雷達(dá)方案、有攝像頭方案再加激光雷達(dá),叫多傳感器融合方案。這個(gè)時(shí)候采集回來的信息量大了,對(duì)于車子的算力以及算法要求就會(huì)高很多。你想,在目前的情況下,能夠搞定多傳感器融合方案的算法的,有幾家?沒幾家。
第三,就是在目前實(shí)際使用場景下,大多數(shù)的這個(gè)場景,比如我們開車的時(shí)候,基本上你車是有燈光的。而且即使是比較大的雨、比較大的霧的情況下還是比較少見,這種情況你自己也基本上不敢開。
所以絕大多數(shù),你的用車場景視覺方案,都能夠解決掉,而激光雷達(dá),只是在這個(gè)情況下,更加增加你的識(shí)別度,增加安全性。如果說車企又沒有能力,去解決多傳感器融合方案的算力和算法的話,那么反倒容易出現(xiàn)卡死的情況。
所以,基于以上幾個(gè)原因,為什么現(xiàn)在越來越多的廠家,開始干脆如果自己做,我就做純視覺方案。
特斯拉不是有個(gè)樣板打在那里嘛,人家特斯拉這個(gè)純視覺方案都能做好。那我就做單一的純視覺方案,我把激光雷達(dá)砍掉既省了成本,而且少了麻煩。
最關(guān)鍵是不要投入那么多研發(fā),當(dāng)然真正有實(shí)力的,是能夠把多傳感器融合方案把它做好的。也就是說接下來幾年,我們看智能駕駛,智能駕駛的好與壞是體現(xiàn)在特殊情況下,極限情況下它的應(yīng)變能力。
你看誰家的傳感器多,而且不僅要多,關(guān)鍵是要協(xié)調(diào)的好,算力夠算法強(qiáng),它才能夠?qū)崿F(xiàn)。要不然的話,對(duì)于學(xué)渣而言,你給它的東西越多,文具越多越害他。
更多新聞推薦
-

2024長三角巾幗創(chuàng)新創(chuàng)業(yè)大賽科技創(chuàng)新組復(fù)賽圓滿收官
公司新聞 2024-11-07 -
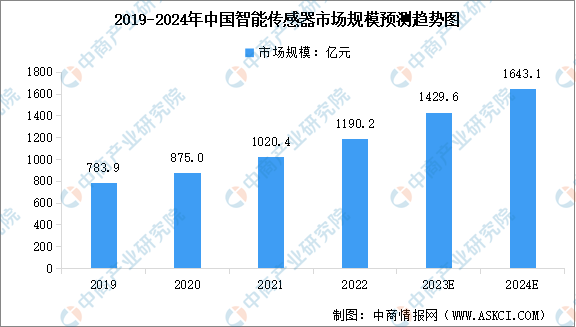
2024年中國智能傳感器市場規(guī)模及行業(yè)發(fā)展趨勢(shì)預(yù)測(cè)分析(圖)
公司新聞 2024-07-26 -

必一運(yùn)動(dòng)科技:智能網(wǎng)聯(lián)汽車多領(lǐng)域融合協(xié)同自動(dòng)駕駛商業(yè)化落地提
公司新聞 2024-07-05 -

必一運(yùn)動(dòng):廣州領(lǐng)先開通了!市中心直達(dá)機(jī)場、南站價(jià)格“真香”→
公司新聞 2025-02-24




